
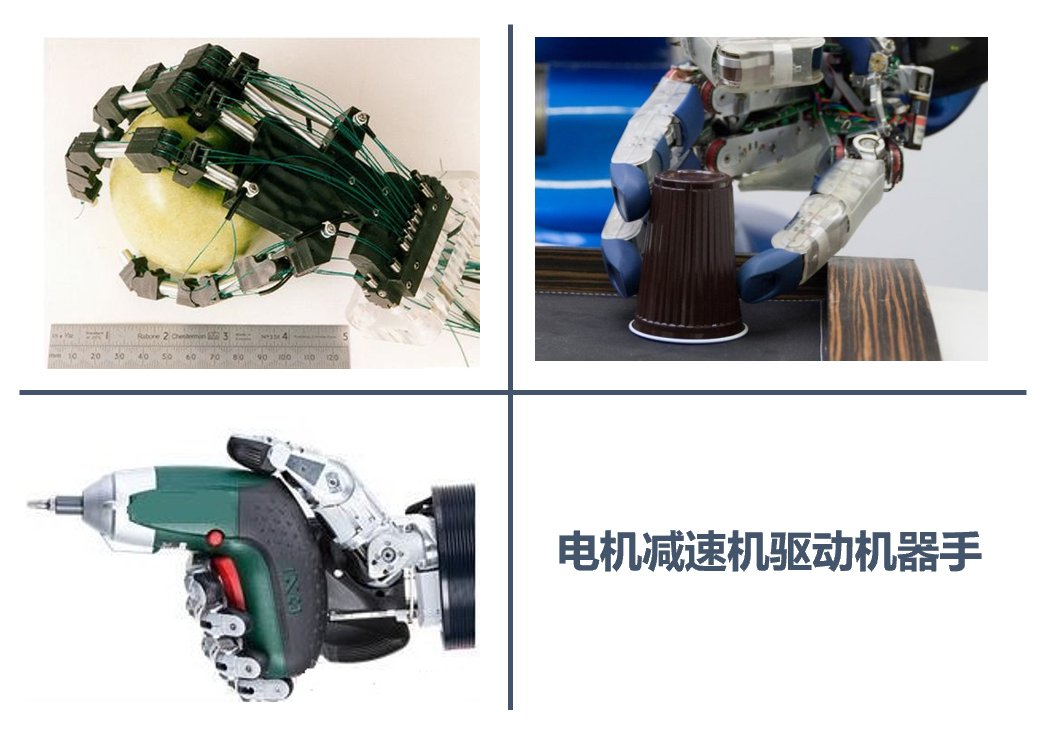
机器人关节柔性驱动器
机器人灵巧手现状:推理小,速度低,承受冲击载荷能力差
超微型球形泵解决方案
超微型球形泵电液作动器的特点:
1. 全球体积最小的球形液压泵
2. 用球形泵正反转特点推动推拉杆伸缩,省去换向阀
3. 作动器可以整体放置在一个封闭的弹性胶囊中,消除工作液泄漏隐患
4. 超微型电液作动器可以实现分布式布置
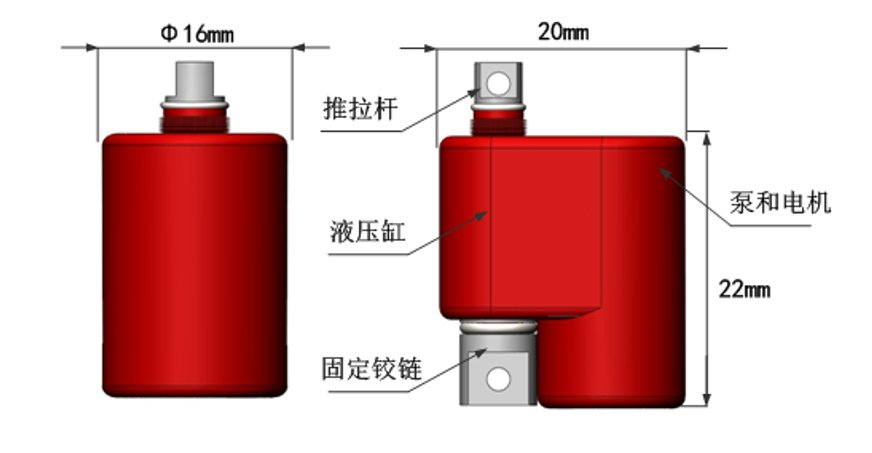
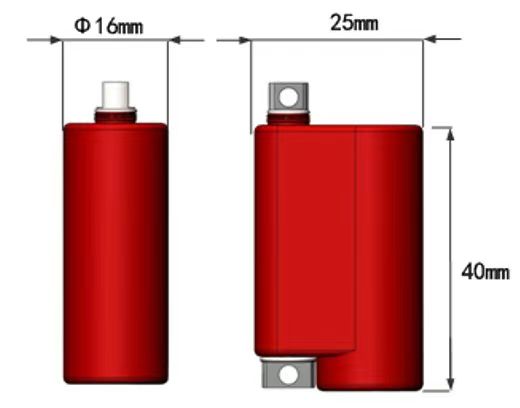
超微型球形泵电液作动器
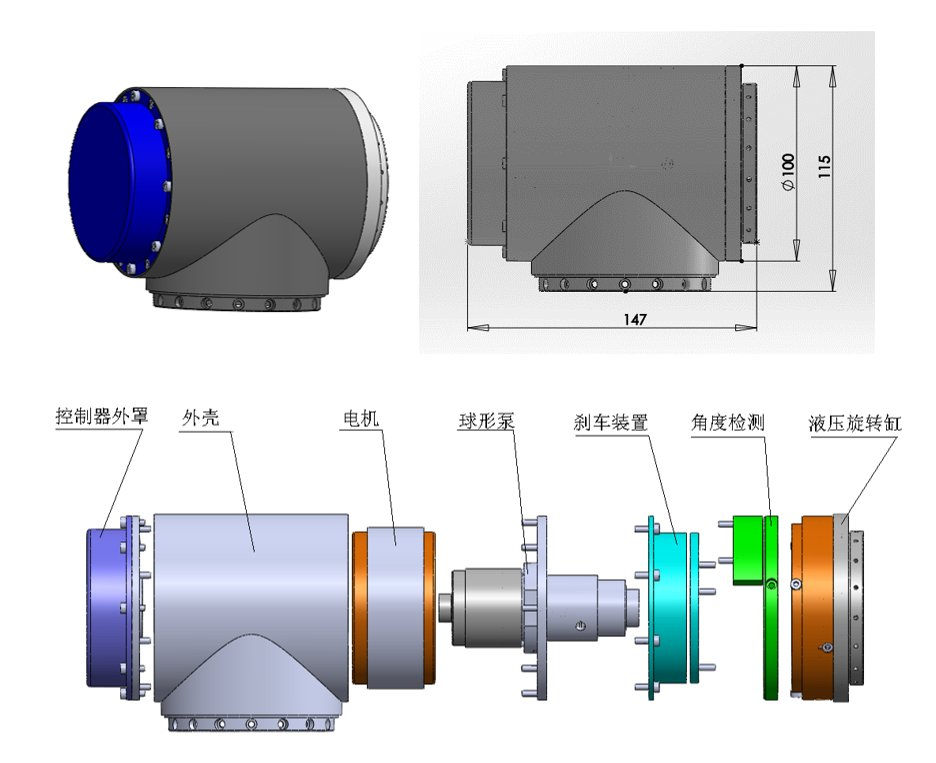
球形泵机器人关节柔性驱动器
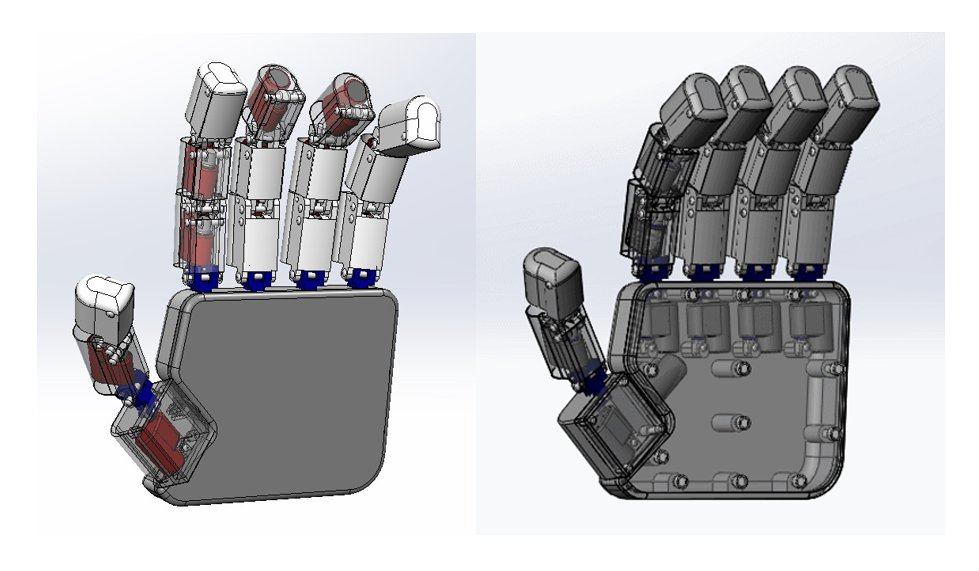
超微型球形泵电液作动器驱动灵巧手
应用实例之一:机器手掌心驱动电液作动器
性能参数:
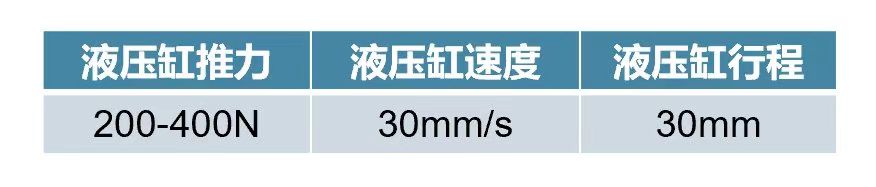
与现有电机减速器超微型作动器相比,超微型球形泵电液作动器的优势有:
速度是其2-4倍
推力是其2-4倍
体积是其60-70%
能耐受冲击载荷

声明:此篇为我的网站原创文章,转载请标明出处链接: http://www.sphericalpower.com/h-nd-7.html